Drone tips
Drone tips for a safe flight
After about 2 years of experience in flying, I learn a lot and found out that I was very lucky to not have more trouble during my flight at the beginning of these projects.
So, I save you a lot of trouble by writing down all what I found so far as a list of things to think before and during flight. You will have to read but also follow these. Don’t jump too fast to the next step…
I supposed you already read all the checking list before sending something in the air, so I will jump to other matters.
It’s always good to picture in your head how will look the view from the sky, it will help to decide your flying path.
This castle is almost invisible from the ground, but looking great at 150m high (France, 2012)

Don’t over estimate yourself.
Flying is easy at first: you buy a copter, you turn it on, it’s flying in a field, and you are a pilot!
The feeling of controlling something in the air with the feedback by picture of film from there is quite crazy and make move quickly to found a new limit.
Just don’t jump too fast to the next step. Take over and land in many different situations before you could fly for real. If your fear will be to put it down without smashing it to the ground, train yourself as much as possible on it instead of flying as long as you can to avoid this moment.
Keep training in an open field as much as you can. Flying should be an automatism; you should not have to think which stick does what in which direction. This is when you feel a bit secure, that you are the most dangerous, keep flying, with the sun in front, without the sun, with few wind, and without. Always in a large empty open area. Try some game by drawing a pattern to follow at each flight even if it looks useless and boring at first.
Of course, do not flight without line of sight, do not use fpv at first, be comfortable with flight behavior before going for the real fun.
If you add new design, start again this training part.
At one point, you may have your friend challenging you or your Client asking you something you think it will be hard to do. You should have the right to say no. He don’t know how hard some position can be, don’t put yourself in an uncomfortable situation by accepting something too dangerous.
Here is a patchwork of picture assembled to make the full view; altitude is 150m, a good way to avoid the use of wide lens. (At Kushan, China, 2012)
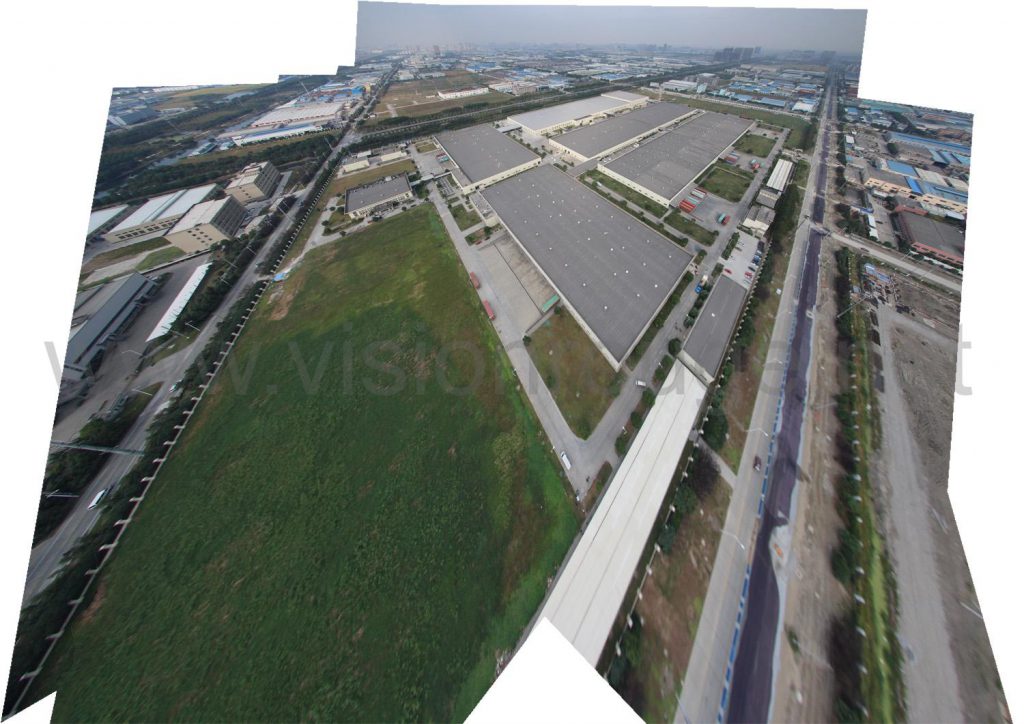
And the final result

Don’t under estimate the air.
Air is not plain static; you can have holes, wind, even in a very tinny terrain. If something happen in the air, be prepare to get a sudden shift of few meters away for any reason.
One basic question is to decide where will be the landing/take of spot and where could you land instead if you can’t bring it back.
This area should be as less windy as possible and as flat as possible.
Flat is important cause the motor will push all together to lift up, so you need an even surface for each blade.
Remove leaves on the ground around it that could flight over and maybe hit the blade or the camera lens and make a spot during all your flight.
I also read a lot about flying in front of the wind, instead of getting pushed by it. In the following video, you will see that it was a wrong idea. First, the copter need to tilt more to keep going forward, so you can see the propeller on the footage, second, when I ask it to lift, as it was tilt, it just keep going front. Here, nobody was hurt; I broke just 2 propellers, and was ready to flight again after a calibration of the compass.
Be advise that your copter will look smaller when up and it will be hard to see where is the front and so hard to know which direction you are flying. It’s always easy to go somewhere, but as the copter become smaller in the sky, it’s very hard to tell if you accelerate too fast in descending for example. This could result on a free fall that you will noticed only when it will be clearly visible again and the order to go up should be moderate to avoid a flip over.
Wait for action before releasing the shutter, here the truck give some life. (France, 2012)

Don’t rely too much on electronics and mechanic.
Either you are flying an “out of the box” drone, either you designed and customized one. In any case, it could not be considered as reliable.
The “out of the box” one is supposed to hold right in most of the case, but they also been designed to fit a minimal cost. Just look at the quality of the motor and propeller of a DJI phantom and you can understand what I’m saying.
The DIY one is more likely to fit your exact requirements, but you need to see the problem happening before you fixing it, quite a challenge. Of course, Internet is full of forum and blog where anyone can give advice, but before following one guy, check his own footage, not the picture of a his wonderful drone standing on a table.
That seems obvious, but, READ THE FUCKING MANUAL! There are steps in checking all is fine with the electronics. Don’t’ jump to the motor start pages even if your kids are pressing you around. Read it all and go back to the take of part at the end. For example, I was flying on the top of a swimming pool when the led start flashing weird (yellow/red). I had no idea what it means because I jumped this page too fast. I landed and figured out it was a compass problem later by going online the day after. If the manual and my computer were around me, I will just calibrate it one more time and keep finishing my job.
You will have 2 kind of problem, faulty in the design, and regular break by the simple use of it.
Being in China for example, the beautiful Mikrokopter deigned in Germany faces the heating and humidity problem very quick here. It means larger heat sink that you should glue to the motor controller… and the glue can go off.
The second problem with time is, for example, some wire getting cut by the carbon fiber board with all the vibration. Don’t forget that carbon fiber is a conductive material!
The first kind is hard to avoid if you are doing one design of your own, but the second one should be easier to check by letting your copter going to a full check after each session. All screw, all cable should be inspected.
The tricky part also comes from the receiver and video wireless system. They interact each other and can end in a totally uncontrolled flight. I had a very bad experience with a 1.2 GHz video feed interacting with the remote 2.4 GHz. Don’t mix them, period. Better to go for a 2.4 GHz remote system and 5.8Ghz Video feed. Cloverleaf antenna everywhere, diversity receiver is also a must.
Do not rely on your fpv system only; keep your copter in line of sight all the time! The battery of the camera can die and you are just getting blind!
As a sample, I found a weird behavior from my phantom copter; if you shake it in the air after a very fast acceleration and sudden direction change or plug some accessories after turning the copter on, all the flying order are executed in reverse, left become right, front become rear, only up down command stay the same. It happen twice already and I know how to avoid it, but I must say it was quite tricky to bring it back the first time it’s happen!
The GPS is also a tricky help.
You have to understand that in a plain open space, it’s accurate about 5 meters in the right condition. It’s perfect to hold against the wind for example. But as soon as you have some walls or metal, it could make your copter jump suddenly 10 meters, even losing the gps for few second and getting some weird beeping all around. If you can flight without it, just do without. It should not be consider as a help inside any building anyway, the satellite will not be founded, and the precision is not enough for flight close to walls.
Always do the gyroscope calibration on the location you are supposed to flight, about 20mn after you put the copter out of its case to let the temperature get right.
Do not be cheap on your spare part choice, up in the air, the 2 cent you saved on the plastic screw or electric plug could cost you way more if all goes down. Cheap batteries can create huge magnetic field and interact with navigation system.
Miniature effect on a simple view can make it nice. (France 2012)

The others.
Sometime a public will join you; friends, family, dogs,.. This is not a toy, and you should control them as you controlling your drone.
Nobody between you and the copter, and if you are moving back, they should move back too. They have to keep eyes on it, but also on where they are to not fall when they are looking up.
This looks ridiculous, but it happen to me that one guy, just jump close to my copter when I was hovering to take a picture with his phone. He was too focused on his camera that he barely noticed that I was getting closer because the wind was not in the right direction. This stupid behavior need to be avoided before you are flying by closing the landing area with some rope for example.
The second question your audience will ask after the cost will be “how fast it can goes?” and you will just push the stick forward to show them… This is dangerous as you should be very careful when slowing it down to avoid a flip or a free fall. Don’t listen the other, you are the one in charge with the remote.
And last but not least.
Ask yourself where you will be flying, draw a fly path in your mind before even choosing the take off position and make sure you will be able to see all aspect of it. If you flying commercial for a shoot, it’s necessary to ask what kind of picture or footage he need. Some footage look just great and are easy to do, don’t go too far to get something good. Linear path are easy, curve are tricky cause the copter tend to drift and do not rotate that well on itself.
I also found that it was easier to bring back the drone than sending it somewhere, so you can wonder if you can shoot on the way back and reverse the footage speed in post.
I hope this few sentences will be helpful, feel free to contact me for any question, all picture copyright www.visionrouge.com